

 Güney Kore Pohang Bilim ve Teknoloji Üniversitesi’nden araştırmacılar su altında yüzgeçleriyle yüzebilen, gerektiğinde dipte yürüyüp sürünebilen yeni bir robot geliştirdi. Araştırmacılar robotun geleneksel olarak iticilerle hareket eden su altı araçlarından daha iyi performans gösterdiğini belirtiyor.
Güney Kore Pohang Bilim ve Teknoloji Üniversitesi’nden araştırmacılar su altında yüzgeçleriyle yüzebilen, gerektiğinde dipte yürüyüp sürünebilen yeni bir robot geliştirdi. Araştırmacılar robotun geleneksel olarak iticilerle hareket eden su altı araçlarından daha iyi performans gösterdiğini belirtiyor. Batık gemilerin ve batık yapıların keşfedilmesi ve incelenmesi gibi görevlerde su altı ROV’ları (uzaktan kumandalı araçlar) sıklıkla kullanılıyor. Tıpkı mürettebatlı denizaltılar gibi, bu araçlar da suda hareket etmek için elektrikli iticiler kullanıyor. Ancak, bu iticilere deniz yosunu, sarkan kablolar, oltalar ve diğer istenmeyen nesneler sıkışabiliyor. Üstelik sert akıntılar da bu araçların hareket etmesini zorlaştırabiliyor. HERO-BLUE isimli robot da tam bu noktada işlevsel olması amacıyla geliştirilmiş bir araç.
Adı “Hazardous and Extreme environment RObot for Biomimetic multiLocomotion-based Underwater Expedition” ifadesinin kısaltması olan deneysel cihaz, zorlu ve ekstrem koşullarda görev yapabilmesi için Güney Kore Pohang Bilim ve Teknoloji Üniversitesi’nden Taesik Kim ve meslektaşları tarafından geliştirildi.
Dört adet çok modlu yüzgeçe sahip
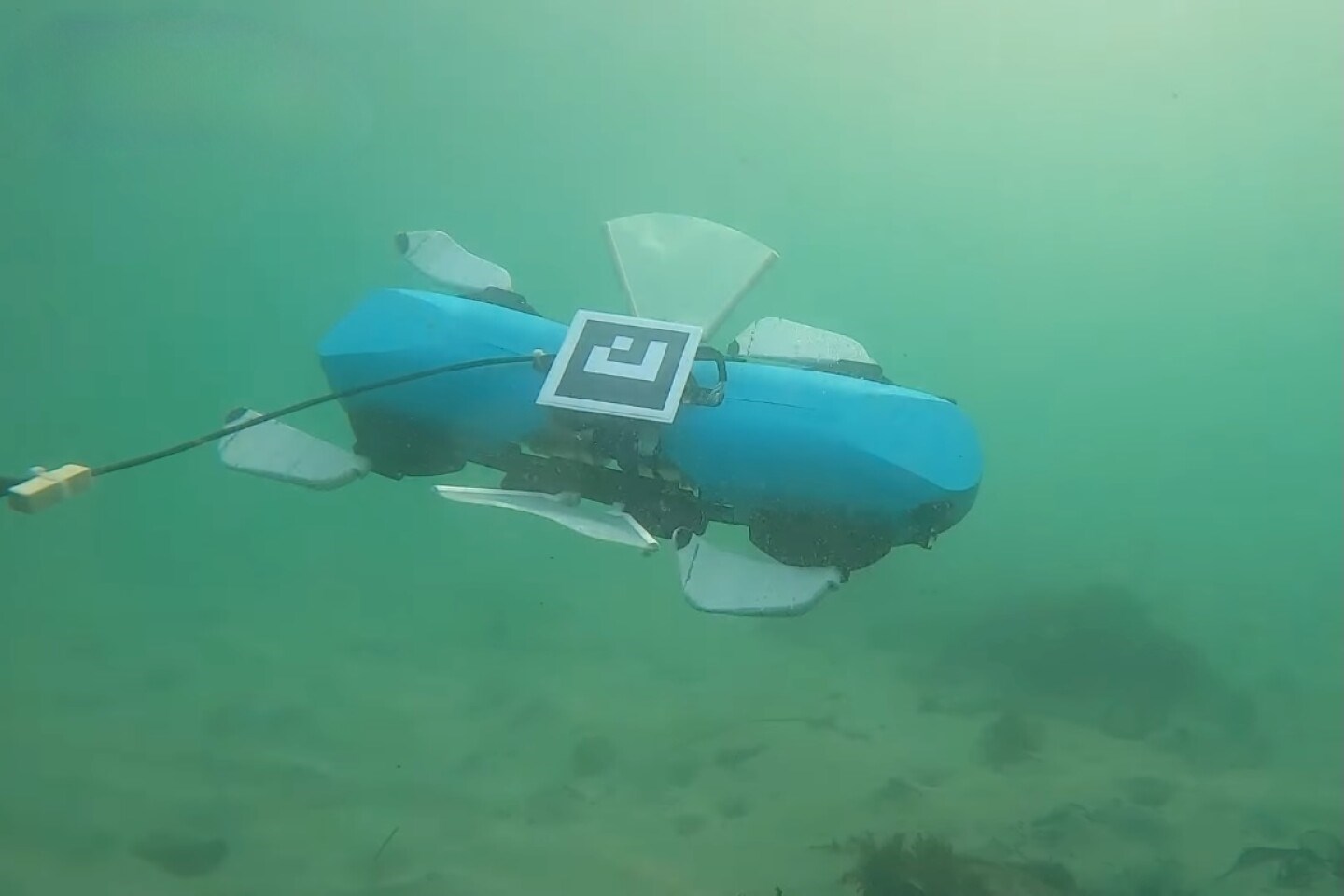
HERO-BLUE’nun gövdesinde ikisi önde ve ikisi arkada olmak üzere dört adet çok modlu yüzgeç bulunuyor. Ayrıca gövdenin ortasında her iki tarafta birer yan yüzgeç yer alıyor.
Çok modlu yüzgeçlerden her biri, elastomer “tendonlar” ile birbirine bağlanan çeşitli polimer panellerden oluşuyor. Yüzgeçler bir yönde kuvvet uygulandığında sert kalacak, diğer yönde kuvvet uygulandığında ise esneyecek şekilde imal edilmiş. Yan yüzgeçlerin her biri, iki sert çubuğun arasına gerilen elastomer zardan oluşuyor.
HERO-BLUE yüzerken, çok modlu yüzgeçler tıpkı bir balığın göğüs yüzgeçleri gibi yukarı ve aşağı kanat çırpıyor. Yan yüzgeçler ise daha ince manevralar için gerektiğinde devreye girerek bıçak balığının alt yüzgeci gibi dalgalı bir şekilde hareket edebiliyor.
 Güçlü akıntılarda ise yüzmek işe yaramayacağı için, robot deniz tabanına indirilerek çok modlu yüzgeçler yardımıyla deniz tabanında yürüyebiliyor.Yüzgeçler robotun gövdesini ileri doğru çekerken sert kalırken, bir sonraki adımı atmak için tekrar öner doğru kaldırıldığında esnek hale geliyor. Böylece suyun dibinde etkili bir şekilde yürümek mümkün oluyor.
Güçlü akıntılarda ise yüzmek işe yaramayacağı için, robot deniz tabanına indirilerek çok modlu yüzgeçler yardımıyla deniz tabanında yürüyebiliyor.Yüzgeçler robotun gövdesini ileri doğru çekerken sert kalırken, bir sonraki adımı atmak için tekrar öner doğru kaldırıldığında esnek hale geliyor. Böylece suyun dibinde etkili bir şekilde yürümek mümkün oluyor. Ortada yer alan eklem sayesinde suda kıvrılarak hareket edebiliyor
Çok sığ sularda ise semenderlerden ilham alınarak orta kısma yerleştirilen eklem sayesinde robotun ön ve arka kısmı sağa sola esneyerek güçlü akıntılarda bile robot ileri doğru hareket edebiliyor.
HERO-BLUE 80 cm uzunluğa, 60 cm genişliğe, 30 cm yüksekliğe ve 11,3 kg ağırlığa sahip. Robot şuan için uzaktan kontrol edilse de, ön tarafında stereoskopik görüş için iki kamera modülü barındırıyor. Bu modülle beraber ileride otonom olarak çalıştırılması planlanıyor.